Come funziona la funzione di evitamento degli ostacoli dello Xiaomi Robot Vacuum X20 Max?
*Questa pagina è stata tradotta dall'articolo inglese automaticamente.
I principi di funzionamento della funzione di evitamento degli ostacoli sono i seguenti:
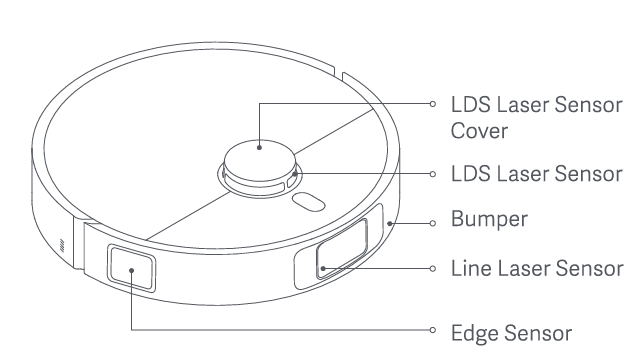
1. La parte anteriore del robot aspirapolvere è dotata di un sensore laser di linea, in grado di rilevare vari ostacoli sul terreno, misurare la distanza e pianificare autonomamente di rallentare in anticipo per evitare collisioni;
2. Dotato di un sensore laser lungo il bordo davanti al lato. È in grado di misurare la distanza e ridurre le collisioni durante il processo di laminazione, con conseguente maggiore efficienza delle lamine;
3. Il paraurti può proteggere efficacemente la sicurezza del dispositivo;
4. Il sensore laser LDS può misurare l'altezza degli ostacoli davanti e determinare se è possibile entrare sotto il letto o il divano.
Le posizioni dei sensori sono mostrate nell'immagine seguente:
1. La parte anteriore del robot aspirapolvere è dotata di un sensore laser di linea, in grado di rilevare vari ostacoli sul terreno, misurare la distanza e pianificare autonomamente di rallentare in anticipo per evitare collisioni;
2. Dotato di un sensore laser lungo il bordo davanti al lato. È in grado di misurare la distanza e ridurre le collisioni durante il processo di laminazione, con conseguente maggiore efficienza delle lamine;
3. Il paraurti può proteggere efficacemente la sicurezza del dispositivo;
4. Il sensore laser LDS può misurare l'altezza degli ostacoli davanti e determinare se è possibile entrare sotto il letto o il divano.
Le posizioni dei sensori sono mostrate nell'immagine seguente:
È stato utile?
Sì
No