Chức năng tránh chướng ngại vật của Xiaomi Robot Vacuum X20 Max hoạt động như thế nào?
*Đây là trang được dịch tự động từ các bài viết tiếng Anh.
Nguyên tắc hoạt động của chức năng tránh chướng ngại vật như sau:
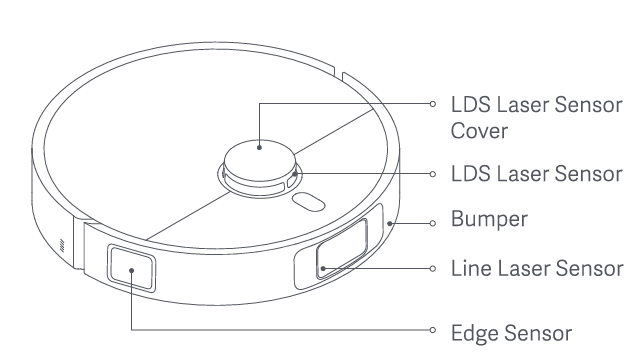
1. Mặt trước của robot hút bụi được trang bị cảm biến laser dòng, có thể cảm nhận các chướng ngại vật khác nhau trên mặt đất, đo khoảng cách và tự động lên kế hoạch giảm tốc độ trước để tránh va chạm;
2. Được trang bị một cảm biến laser dọc theo cạnh ở phía trước của bên. Nó có thể đo khoảng cách và giảm va chạm trong quá trình cạnh, dẫn đến hiệu quả cạnh cao hơn;
3. Cản trước có thể bảo vệ hiệu quả sự an toàn của thiết bị;
4. Cảm biến laser LDS có thể đo chiều cao của các chướng ngại vật phía trước và xác định xem có thể vào dưới gầm giường hay ghế sofa hay không.
Vị trí của các cảm biến được hiển thị trong hình sau:
1. Mặt trước của robot hút bụi được trang bị cảm biến laser dòng, có thể cảm nhận các chướng ngại vật khác nhau trên mặt đất, đo khoảng cách và tự động lên kế hoạch giảm tốc độ trước để tránh va chạm;
2. Được trang bị một cảm biến laser dọc theo cạnh ở phía trước của bên. Nó có thể đo khoảng cách và giảm va chạm trong quá trình cạnh, dẫn đến hiệu quả cạnh cao hơn;
3. Cản trước có thể bảo vệ hiệu quả sự an toàn của thiết bị;
4. Cảm biến laser LDS có thể đo chiều cao của các chướng ngại vật phía trước và xác định xem có thể vào dưới gầm giường hay ghế sofa hay không.
Vị trí của các cảm biến được hiển thị trong hình sau:
Thông tin này có hữu ích không?
Có
Không