Comment fonctionne la fonction d'évitement d'obstacles du Xiaomi Robot Vacuum S20+ ?
*Cette page est traduite automatiquement de l'article anglais
Les méthodes de fonctionnement de
lafonction d'évitement d'obstacles sont illustrées ci-dessous
:
1. Un capteur laser linéaire est installé devant l'aspirateur robot, qui peut détecter divers obstacles au sol, mesurer la distance et planifier de manière autonome de ralentir à l'avance pour éviter les collisions ;
2. Un capteur de bord est installé sur le côté avant, qui mesure la distance par rapport au bord, réduit la collision et est plus efficace ;
3. Le pare-chocs peut protéger efficacement l'aspirateur robot ;
4. Le capteur laser LDS peut mesurer la hauteur de l'obstacle devant et déterminer s'il est accessible sous le lit ou le canapé.
L'emplacement des capteurs est indiqué dans l'image suivante :
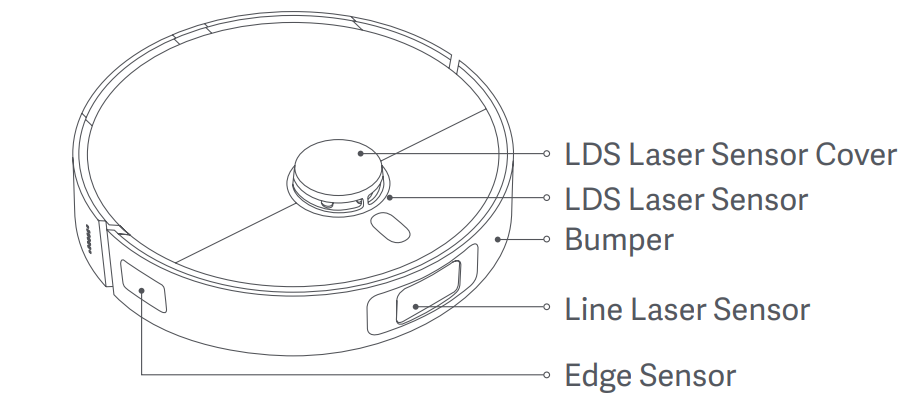
1. Un capteur laser linéaire est installé devant l'aspirateur robot, qui peut détecter divers obstacles au sol, mesurer la distance et planifier de manière autonome de ralentir à l'avance pour éviter les collisions ;
2. Un capteur de bord est installé sur le côté avant, qui mesure la distance par rapport au bord, réduit la collision et est plus efficace ;
3. Le pare-chocs peut protéger efficacement l'aspirateur robot ;
4. Le capteur laser LDS peut mesurer la hauteur de l'obstacle devant et déterminer s'il est accessible sous le lit ou le canapé.
L'emplacement des capteurs est indiqué dans l'image suivante :
Cela vous a-t-il été utile?
Oui
Non