Xiaomi Robot Vacuum X20 Max의 장애물 회피 기능은 어떻게 작동하나요?
*이 페이지는 영어 문서에서 자동으로 번역되었습니다.
장애물 회피 기능의 작동 원리는 다음과 같습니다.
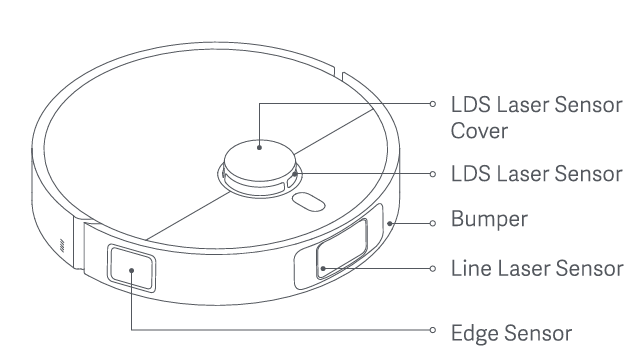
1. 로봇 청소기의 전면에는 라인 레이저 센서가 장착되어 지상의 다양한 장애물을 감지하고 거리를 측정 하며 충돌을 피하기 위해 미리 자율적으로 속도를 늦출 수 있습니다.
2. 측면 앞의 가장자리를 따라 레이저 센서가 장착되어 있습니다. 거리를 측정하고 가장자리 프로세스 중 충돌을 줄여 가장자리 효율성을 높일 수 있습니다.
3. 범퍼는 장치의 안전을 효과적으로 보호할 수 있습니다.
4. LDS 레이저 센서는 전방 장애물의 높이를 측정하고 침대나 소파 아래에 들어갈 수 있는지 여부를 결정할 수 있습니다.
센서의 위치는 다음 그림에 나와 있습니다.
1. 로봇 청소기의 전면에는 라인 레이저 센서가 장착되어 지상의 다양한 장애물을 감지하고 거리를 측정 하며 충돌을 피하기 위해 미리 자율적으로 속도를 늦출 수 있습니다.
2. 측면 앞의 가장자리를 따라 레이저 센서가 장착되어 있습니다. 거리를 측정하고 가장자리 프로세스 중 충돌을 줄여 가장자리 효율성을 높일 수 있습니다.
3. 범퍼는 장치의 안전을 효과적으로 보호할 수 있습니다.
4. LDS 레이저 센서는 전방 장애물의 높이를 측정하고 침대나 소파 아래에 들어갈 수 있는지 여부를 결정할 수 있습니다.
센서의 위치는 다음 그림에 나와 있습니다.
도움이 되었습니까?
예
아니요